There are a few points (x1, y1), (x2, y2), (x3, y3) … We want to find the line which is closest from these points. The line is described as  .
.
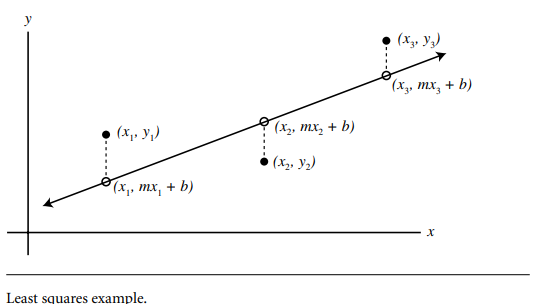
The problem can be convert to how to make the value of  smallest.
smallest.
We get the new function which has variables b and m.
If the derivatives of  to b and m, respectively become zero, the minimum value will occur.
to b and m, respectively become zero, the minimum value will occur.

=>

=>
So we get the following two equations.

![\[\begin{pmatrix}1 & 1 & 1\\x_1 & x_2 & x_3\end{pmatrix}\begin{pmatrix}mx_1 + b - y_1 \\mx_2 + b - y_2 \\mx_3 + b - y_3\end{pmatrix} = 0\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-3a1607d1a54aca5efcb5ea069c6a47d1_l3.png "Rendered by QuickLaTeX.com")
=>
![\[\begin{pmatrix}1 & 1 & 1\\x_1 & x_2 & x_3\end{pmatrix}\begin{bmatrix}\begin{pmatrix}mx_1 + b \\mx_2 + b \\mx_3 + b\end{pmatrix} -\begin{pmatrix}y_1 \\y_2 \\y_3\end{pmatrix}\end{bmatrix}= 0\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-77276c89c70b9740fb71f21873b999f0_l3.png "Rendered by QuickLaTeX.com")
=>
![\[\begin{pmatrix}1 & 1 & 1\\x_1 & x_2 & x_3\end{pmatrix}\begin{bmatrix}\begin{pmatrix}x_1 & 1 \\x_2 & 1 \\x_3 & 1\end{pmatrix}\begin{pmatrix}m \\b\end{pmatrix} -\begin{pmatrix}y_1 \\y_2 \\y_3\end{pmatrix}\end{bmatrix}= 0\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-f8133bbf570c58d5781f4f4199cf4949_l3.png "Rendered by QuickLaTeX.com")
we have:
![\[M^T[Mf - Y] = 0\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-f516cad7e4e1fc8c5105a082336b96a6_l3.png "Rendered by QuickLaTeX.com")
![\[M^TMf - M^TY = 0\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-9bbd2de54994b409ce0684c6f3edcd96_l3.png "Rendered by QuickLaTeX.com")
![\[f=(M^TM)^{-1}(M^TY)\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-02ac0df06032ca8e829e745eb8692311_l3.png "Rendered by QuickLaTeX.com")
Let’s create a few random points and use algorithm library CGAL and the visualization toolkit (VTK) to find and draw the closest line by a demo.
main.cpp
#include <CGAL/Linear_algebraCd.h>
#include <CGAL/Linear_algebraHd.h>
#include <iostream>
#include <vtkPolyData.h>
#include <vtkProperty.h>
#include <vtkPolyDataMapper.h>
#include <vtkActor.h>
#include <vtkPlane.h>
#include <vtkRenderer.h>
#include <vtkRenderWindow.h>
#include <vtkRenderWindowInteractor.h>
#include <vtkPoints.h>
#include "point.hpp"
using namespace std;
using namespace CGAL::Linear_Algebra;
typedef CGAL::Linear_algebraCd<double> LA;
typedef LA::Matrix Matrix;
typedef LA::Vector Vector;
#define vtkSPtr vtkSmartPointer
#define vtkSPtrNew(Var, Type) vtkSPtr<Type> Var = vtkSPtr<Type>::New();
template <typename Type>
Matrix BuildMatrix( int rowCount, int colCount, std::vector<Type> values )
{
std::vector<Vector> elements;
for( int col = 0; col < colCount; ++col )
{
std::vector<Type> tmp;
for( int row = 0; row < rowCount; ++row )
{
tmp.push_back( values[row*colCount + col] );
}
elements.push_back( Vector( tmp.begin(), tmp.end() ) );
}
Matrix M( elements.begin(), elements.end() );
return M;
}
int main()
{
CGAL::set_mode( cout, CGAL::IO::PRETTY );
std::vector<Point> samplePts{{4, 17, 0 },
{5, 15, 0 },
{9.5, 13.5, 0},
{16.5, 7.9, 0},
{21, 5,0 } };
// build matrix M
std::vector<double> values;
for( int i = 0; i < samplePts.size(); i++ ){
values.push_back( samplePts[i][0] );
values.push_back( 1 );
}
Matrix M = BuildMatrix( samplePts.size(), 2, values );
cout << M << endl;
values.clear();
for( int i = 0; i < samplePts.size(); ++i ){
values.push_back( samplePts[i][1] );
}
Matrix Y = BuildMatrix( samplePts.size(), 1, values );
double det;
Matrix tmp1 = LA::inverse( LA::transpose( M ) * M, det );
Matrix result = tmp1 * ( LA::transpose( M ) * Y );
cout << "result: " << result << endl;
// =================== draw line ==================
double m = result[0][0];
double b = result[1][0];
Point p0( 0, 0*m+b, 0 );
Point p1( 25, 25*m+b, 0 );
vtkSPtrNew( lineData, vtkPolyData );
vtkSPtrNew( linePts, vtkPoints );
vtkSPtrNew( lineCells, vtkCellArray );
linePts->InsertNextPoint( p0.point );
linePts->InsertNextPoint( p1.point );
vtkIdType lineIds[2] = { 0, 1 };
lineCells->InsertNextCell( 2, lineIds );
lineData->SetPoints( linePts );
lineData->SetLines( lineCells );
lineData->Modified();
vtkSPtrNew( lineMapper, vtkPolyDataMapper );
lineMapper->SetInputData( lineData );
vtkSPtrNew( lineActor, vtkActor );
lineActor->SetMapper( lineMapper );
lineActor->GetProperty()->SetColor( 1, 0, 0 );
lineActor->GetProperty()->SetLineWidth( 2 );
// =============== draw points =============
vtkSPtrNew( polyData, vtkPolyData );
vtkSPtrNew( points, vtkPoints );
vtkSPtrNew( cells, vtkCellArray );
for( int i = 0; i < samplePts.size(); ++i )
{
points->InsertNextPoint( samplePts[i].point );
vtkIdType ids[] = { i };
cells->InsertNextCell( 1, ids );
}
polyData->SetPoints( points );
polyData->SetVerts( cells );
polyData->Modified();
vtkSPtrNew( mapper, vtkPolyDataMapper );
mapper->SetInputData( polyData );
vtkSPtrNew( actor, vtkActor );
actor->SetMapper( mapper );
actor->GetProperty()->SetPointSize( 5 );
vtkSPtrNew( renderer, vtkRenderer );
renderer->AddActor( actor );
renderer->AddActor( lineActor );
renderer->SetBackground( 0, 0, 0 );
vtkSPtrNew( renderWindow, vtkRenderWindow );
renderWindow->AddRenderer( renderer );
vtkSPtrNew( renderWindowInteractor, vtkRenderWindowInteractor );
renderWindowInteractor->SetRenderWindow( renderWindow );
renderer->ResetCamera();
renderWindow->Render();
renderWindowInteractor->Start();
return 0;
}
The header file point.hpp contains the implementations of class Point. You can find it in Project Point On Line And Plane By Special Direction.
Result: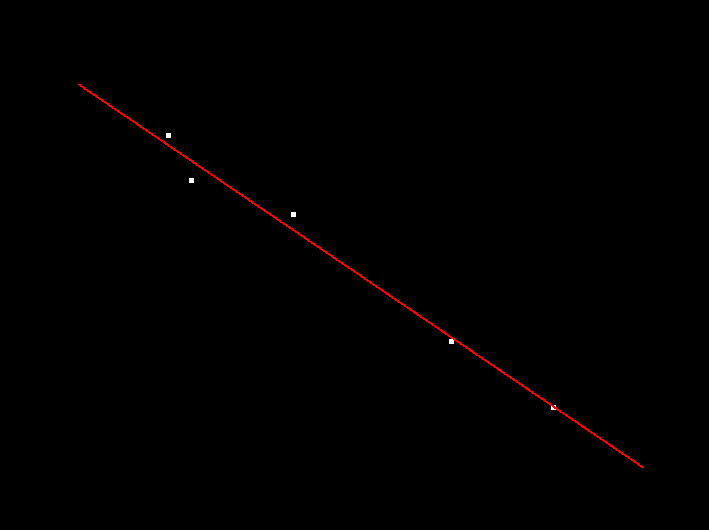
I have to put the content of CMakeLists.txt to the next page due to a few Latex render errors. The file configures our project to import CGAL and VTK easily.



{kind=link}
[…] had found the closest line between points in the 2D world by least squares, link: Find Closest Line Between Points In 2D By Least Squares I will show how to find the closest plane closest to a few random points in the 3D environment. We […]