Math
Compare Cardinal Spline and Uniform Cubic Spline
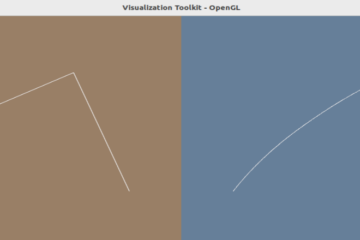
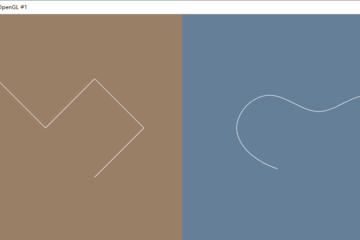
Uniform Cubic Spline To Smooth Segments Change input points and use the Cubic piecewise function introduced in Basic functions for B-Spline to create smooth curve. The left renderer shows polygon lines through original points, and the right one is the smooth curve generated by algorithm. Cardinal Spline To Smooth Segments Read more…