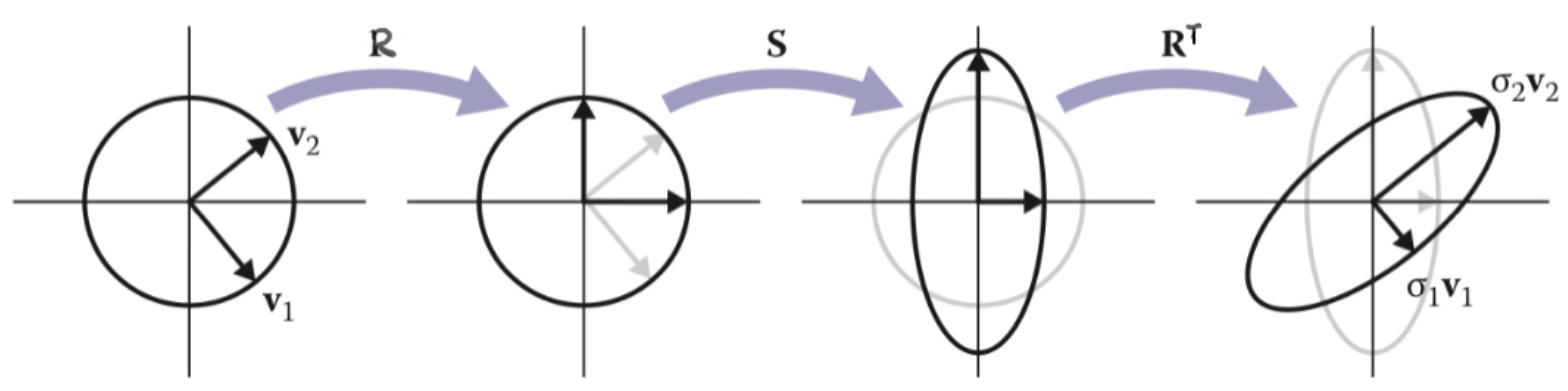
As with 2D transforms, any 3D transformation matrix can be decomposed using SVD into a rotation, scale, and another rotation.
Any symmetric 3D matrix has an eigenvalue decomposition into rotation, scale, and inverse-rotation.
Finally, a 3D rotation can be decomposed into a product of 3D shear matrices.
Rotate about z-axis:
![\[rotateZ(\phi) = \begin{pmatrix} cos\phi & -sin\phi & 0 \\ sin\phi & cos\phi & 0 \\ 0 & 0 & 1 \end{pmatrix}\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-60284340093dc4d7c9eb6082388b56e2_l3.png "Rendered by QuickLaTeX.com")
Rotate about x-axis:
![\[rotateX(\phi) = \begin{pmatrix} 1 & 0 & 0 \\ 0 & cos\phi & -sin\phi \\ 0 & sin\phi & cos\phi \end{pmatrix}\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-d68805ce14a63748eacb879c64afb60c_l3.png "Rendered by QuickLaTeX.com")
Rotate about y-axis:
![\[rotateY(\phi) = \begin{pmatrix} cos\phi & 0 & sin\phi \\ 0 & 1 & 0 \\ -sin\phi & 0 & cos\phi \end{pmatrix}\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-3db3088e63416c841b6c30bca63096de_l3.png "Rendered by QuickLaTeX.com")
The inverse of an orthogonal matrix is awalys its transpose.
So if there is a rotate matrice  of 3D object,
of 3D object,  .
.
For example,
![\[rotateZ(\phi)^{T} = \begin{pmatrix} cos\phi & sin\phi & 0 \\ -sin\phi & cos\phi & 0 \\ 0 & 0 & 1 \end{pmatrix}\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-43d0c5f66ae219a7950cee7010dd4880_l3.png "Rendered by QuickLaTeX.com")
Then we have:
![\[rotateZ(\phi) \times rotateZ(\phi)^{T} = E\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-4a99097b39c98f0a90dbea3222bc1f23_l3.png "Rendered by QuickLaTeX.com")
So we get:
![\[rotateZ(\phi)^{T} = rotateZ(\phi)^{-1}\]](https://www.weiy.city/wp-content/ql-cache/quicklatex.com-f5f55ace5b69b741656fe90e89e5c805_l3.png "Rendered by QuickLaTeX.com")
Here is a way to scale object along the direction (1, 1, 0). Rotate the vector(1, 1, 0) to the standard asix firstly, scale it along Y axis and rotate it back finally.
The whole process can be written  .
.
 is equivalent to
is equivalent to  in this scene.
in this scene.
{kind=link}